Loop Nodes
How to use
Circularity is an inevitable component of dynamical systems. To model such feedback loops while preserving a causal structure, vip-ivp provides Loop Nodes.
A Loop Node is a placeholder variable that can be used to define other variables before being assigned a value. This is useful for defining equations where a variable’s derivative depends on the variable itself.
Loop Nodes must always follow the same pattern:
- Create the highest order derivative using a Loop Node by calling
vip.loop_node(). - Use the created Loop Node to build other dependent variables.
- Set the Loop Node’s value with
.loop_into(value)after all necessary variables have been defined.
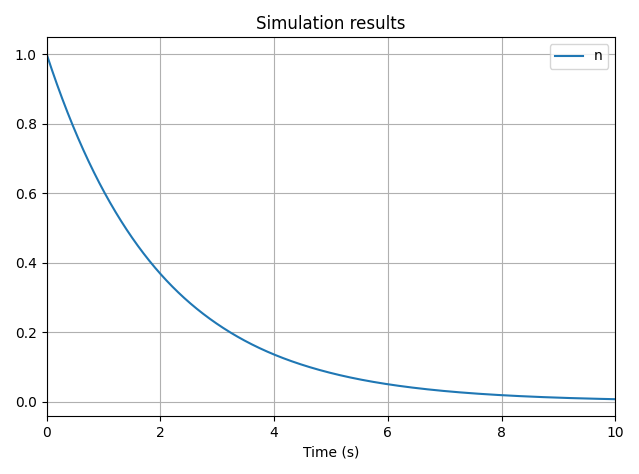
Here’s a minimal example using the exponential decay ODE:
:
lambda_value = 0.5
# 1. Create the highest order derivative using a Loop Node
d_n = vip.loop_node()
# 2. Use the loop node to create the integrated variable
n = vip.integrate(d_n, 1)
# 3. Set the loop node's value
d_n.loop_into(-lambda_value * n)
n.to_plot()
vip.solve(10, time_step=0.001)
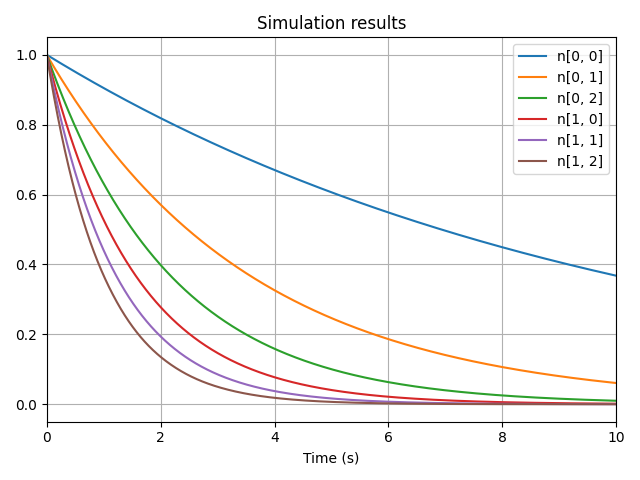
Loop Nodes containing NumPy Arrays
Loop Nodes can represent scalar or array values. When calling vip.loop_node() without arguments, a scalar variable is created. To instantiate a Loop Node with a NumPy array shape, provide the shape argument:
# Multidimensional exponential decay:
import numpy as np
# Array of lambda coefficients
lambdas = np.linspace(0, 1, 6).reshape(2, 3)
# Building the system
d_n = vip.loop_node(shape=(2, 3))
n = vip.integrate(d_n, np.zeros((2, 3)))
# Loop into an array of shape (2, 3)
d_n.loop_into(n * lambdas)
n.to_plot()
vip.solve(10, time_step=0.001)
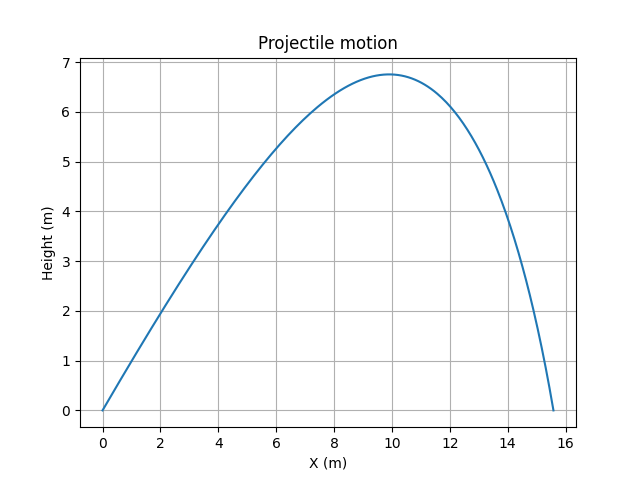
This approach is especially useful for modeling vector quantities, such as positions in 2D or 3D space.
Example: Projectile Motion with Air Drag
import matplotlib.pyplot as plt
import vip_ivp as vip
import numpy as np
# Parameters
GRAVITY = -9.81
v0 = 30
th0 = np.radians(45)
mu = 0.1 # Coefficient of air drag
# Compute initial conditions
v0 = [v0 * np.cos(th0), v0 * np.sin(th0)]
x0 = [0, 0]
# Create the system
acceleration = vip.loop_node(2)
velocity = vip.integrate(acceleration, v0)
position = vip.integrate(velocity, x0)
v_norm = np.sqrt(velocity[0] ** 2 + velocity[1] ** 2)
acceleration.loop_into([-mu * velocity[0] * v_norm,
GRAVITY - mu * velocity[1] * v_norm])
# Terminate on touching the ground
position[1].on_crossing(0, direction="falling", terminal=True)
vip.solve(10, time_step=0.01)
# Plot results
x, y = position.values
plt.plot(x, y)
plt.title("Projectile motion")
plt.xlabel("X (m)")
plt.ylabel("Height (m)")
plt.grid()
plt.show()
Safeguards
Loop Nodes can easily be misused. To prevent common mistakes, several safeguards are implemented.
Enforcing that Loop Nodes Must Be Set
It is easy to forget to set the value of a Loop Node. To avoid silent bugs, an exception is raised during vip.solve() if a Loop Node was never set.
To disable this safety check, pass strict=False when creating the node:
d_n = vip.loop_node(strict=False)
In this case, the Loop Node will behave as if its value is 0 or np.zeros(shape).
Preventing Multiple .loop_into() Calls
A Loop Node can only be set once by default. If you attempt to call .loop_into() a second time, an exception is raised.
To override this behavior and add the new value to the existing one, use force=True:
d_n = vip.loop_node()
n = vip.integrate(d_n, 1)
d_n.loop_into(-0.2 * n)
d_n.loop_into(-0.3 * n, force=True)
The value of the second .loop_into() will be added.
Algebraic loops
Algebraic loops occur when a variable directly depends on itself, e.g. d_n = 2 * d_n. This causes infinite recursion in Python, resulting in a RecursionError.
To avoid this, ensure that any feedback loop includes at least one integration or delay step.
Example of an algebraic loop (don’t do this):
d_n = vip.loop_node()
a = 2 * d_n
d_n.loop_into(a)